首页
格林介绍
律所简介
发展历程
合作伙伴
荣誉资质
机构分布
●广州
●银川
●南沙
专业领域
诉讼仲裁
知识产权
建筑房产
海事海商
金融证券
公司事务
婚姻家庭
劳动人事
刑事辩护
国际事务
管理层架构
管委会成员
律所合伙人
精英团队
执业律师
成功案例
格林资讯
经典案例
格林荣誉
社会责任
格林动态
党建公益
媒体采访
招贤纳士
招聘律师助理
招聘授薪律师
招聘专职律师
联系我们
联系我们
在线留言
G
格林资讯
reen information
经典案例
格林荣誉
社会责任
格林动态
党建公益
媒体采访
当前位置:
首页
>
格林动态
>
格林法谈 | 论“萝卜快跑”交通事故归责原则的构建 ——以侵权责任主体为切入点
一、案例引入
2024年7月7日,百度旗下的自动驾驶出行服务平台萝卜快跑(也被称为“Apollo Go”或者“Robo Taxi”)在武汉发生了一起交通事故,一辆无人驾驶出租车与一名行人发生了轻微碰撞。事故发生时,车辆正在绿灯亮起时启动,而行人则在红灯状态下穿越马路。目前,该行人经过初步检查,未发现明显外伤。百度方面对此事迅速做出了回应,表示将全力配合交警部门的调查,并积极承担相应的责任。这衍生出笔者对此类交通事故的归责原则思考。
图一:萝卜快跑正在行驶中
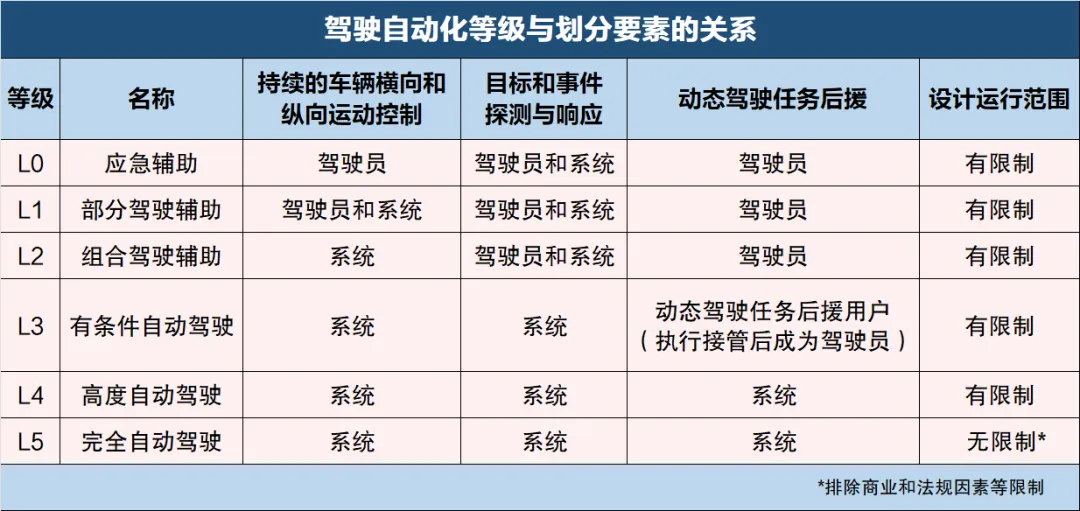
在正式进入这个问题之前,我们首先要对自动驾驶等级有基本的了解。关于自动驾驶的分级,SAE(国际汽车工程师协会)给出了对应的标准,将自动驾驶分成L0-L5六个等级。中国则是根据GB/T40429-2021《汽车驾驶自动化分级》规范,将自动驾驶分为六个等级,但两者其实差别不大,具体可以参考下图。
图二:驾驶自动化等级与划分要素之间的关系
萝卜快跑为百度的自动驾驶出行服务平台,使用百度的自动驾驶平台Apollo的RT6版本方案,自动驾驶的等级为L4即高度自动驾驶状态。在这种状态下,虽然车内没有驾驶员,也无需驾驶员参与,但在幕后有数位“云舱安全员”,负责实时监测车辆状态,在有风险的情况下及时进行人工干预。
如果萝卜快跑发生了交通事故,由于已经消除了传统意义上的驾驶员对于驾驶汽车的影响,自然不能将事故责任归于驾驶员,那是将事故责任归于自动驾驶系统即生产者,还是归于产品的保有人,抑或归于在其中实行人工干预的调度者呢?
二、现有理论争议及评析
(一)产品责任说
该学说主张萝卜快跑发生交通事故时应当主要由汽车的生产者承担责任,例外只存在于使用者存在操作失误或发出错误指令的情形。该观点的缺陷主要有以下几个方面:
第一,证明萝卜快跑存在产品缺陷较为困难。参考《产品质量法》第46条,认定“缺陷”当符合两个标准:即“存在危及他人人身财产的不合理的危险”和“未达到相关国家标准和行业标准”,但在萝卜快跑中,即使其各项指标都符合行业标准和国家标准,也无法排除产品存在不合理危险的可能性。因其特殊的智能属性,致害行为可能是在一系列算法重新组合下产生的。因此不应简单认定萝卜快跑在进入市场前便存在缺陷,也难以要求生产者承担相应责任。
第二,萝卜快跑的缺陷与生产者之间的因果关系很难证明。质量标准是随着时代的发展而不断进步的,即便出厂时产品质量标准合格,也不能保证之后随着科技的发展而发现产品质量也合格。因此倘若以之后的标准要苛求之前的生产者,也是不符合常理的,因而难以要求生产者承担赔偿责任。
(二)高度危险责任说
该学说认为可以基于行为的危险性、尽到注意义务也无法避免损害、无视过错的考量这三个要件,将萝卜快跑的行驶认定为高度危险责任。该观点的缺陷主要有以下几个方面:
第一,我国《民法典》关于高度危险责任的条文中,第1237条至第1244条规定了核设施、民用航空器等具体的“高度危险”作业形式,自动驾驶汽车显然不在此列。从第1236条关于高度危险责任的一般条款看,“高度危险作业”的认定,应当从高度危险作业损害的严重性、损害的难以控制性、损害的异常性及其社会价值来判断。结合目前而言,萝卜快跑显然不满足这一标准。
第二,高度危险作业损害的严重性除了要求威胁的权利位阶高之外,也要求导致的损害极为严重,会造成极大的人身伤亡或者财产损失,比如核电站泄漏或飞机失事等,萝卜快跑显然不在此列。因此不应适用高度危险责任来处理此类交通事故。
三、以侵权主体为标准构建的归责原则
基于对产品责任说和高度危险责任说的辨析,可见相对传统的归责原则难以适应“萝卜快跑”这一新兴领域,应根据其所面临的特殊情况作出调整,应当以不同的侵权责任主体为分类进行讨论,具体包括以调度人为主体的过错责任归责原则、以汽车保有人为主体的无过错责任归责原则以及以汽车生产者为主体的无过错责任归责原则。
图三:百度“萝卜快跑”的调度员
(一)以调度人承担责任的归责原则
对于“萝卜快跑”中的调度人来说,归责原则应适用过错责任。无过错责任原则只要行为人的行为导致了损害结果的发生,无论主观上是否有过错,都应该承担法律责任。而这对调度人的要求是苛刻的,因为如果调度人不主动追求亦不放任交通事故损害结果的发生,却还必须对其意志以外导致的交通事故损害结果承担相应的责任,这是不利于汽车无人驾驶技术的发展与创新的。因此,调度人承担侵权责任的前提是其在实施侵害行为时存在过错,即适用过错责任的归责原则,而调度人的过错则包括在调度车辆时,未按具体的相应规定调度车辆等行为。
(二)以车辆保有人承担责任的归责原则
对于保有人而言,则应当适用无过错责任的归责原则。保有人是指对机动车具有支配权并为自己的利益而使用该车的人,包括机动车的所有人、借用人或租赁人等。根据德国《道路交通法》第七条规定,机动车保有人对车辆运作风险承担法律责任。由此看来,机动车保有人承担赔偿责任应当适用无过错责任的归责原则。此外,萝卜快跑的运行所具有的危险性质,有别于一般的生活风险。因此,保有人责任的最大价值在于对这种危险特别是无法完全避免的危险进行赔偿,即使保有人不存在过错,即保有人应当对其危险承担全面的无过错责任。而在车辆保有人赔偿后,能够证明是因无人驾驶系统原因造成损害的,可以向生产者追偿的。
(三)以车辆生产者承担责任的归责原则
对于生产者而言,应当在证明确是因无人驾驶系统存在缺陷造成损害的,再对其适用无过错责任。依据上文所述,虽然萝卜快跑不能完全适用产品责任说,但将生产者作为可能承担的民事主体也有其合理性。若能证明是因无人驾驶系统本身原因发生交通事故的,无人驾驶汽车生产者应当被认定为承担相应责任的民事主体。目前,我国萝卜快跑正处于快速发展阶段,应当以鼓励技术革新与救济受害人并重为原则来构建此类交通事故责任的归责原则。作为一项新技术,倘若使生产者的责任越来越重,会抑制他们开发新技术的积极性和创新性。因此应反对生产者承担严苛的责任。可先由调度人或者保有人进行赔偿,之后如果能够证明是因无人驾驶系统存在缺陷造成损害的,才可以依法向生产者进行追偿。
此外,还可以引入产品责任险制度,覆盖因产品缺陷造成事故的责任。对于其性质而言:一方面,产品责任险不具有强制性,属于商业险,由生产者一方自主决定是否购买。对此,如果生产者对于自己所生产的产品质量足够自信,其完全可以不投保,而是选择直接承担产品责任。如果企业处于创业初期或者风险承载能力较小,产品责任险也完全可以为其保驾护航,避免因赔偿而对企业本身造成重大打击。另一方面,与机动车交通事故责强制保险不同,交强险的赔偿前提仅要求事实上发生了交通事故,而产品责任险的赔偿则是以生产者一方确应承担产品责任为前提。
综上,对于调度人应当适用过错责任;对于保有人则承担无过错责任;在证明确是因无人驾驶系统存在缺陷造成损害的,对生产者则适用无过错责任同时建议引入产品责任险保障企业发展。通过一套齐备的归责体系的构建,能够较为广泛地覆盖萝卜快跑所引发的责任问题,并且保障各方当事人的合法权益。
———此文由我所曾顺东律师及中山大学大二学生(李疆泽)共同撰写
1.图一图片来源:华夏EV,http://www.evinchina.com/newsshow-429.html,最后一次访问日期:2024年8月14日。
2.图二图片来源:中国人财保险,https://mp.weixin.qq.com/s/mvQ-4aChlxKUJixcMrB6tg,最后一次访问日期:2024年8月14日。
3.依照我国汽车《驾驶自动化分级》(Taxonomy of driving automation for vehicles)标准对无人驾驶系统的要求,无人驾驶汽车需具备调度功能。调度功能是指在无人驾驶系统未规划路线时,可以为无人驾驶汽车指定目的地以及防止无人驾驶汽车超出其运行范围运行,保障乘客顺利到达目的地及自身安全的功能。具备无人驾驶模式的车辆可以被调度,而实现以上这些功能的人便被称作无人驾驶汽车的调度人。
4.图三图片来源:微信公众号“大禹说事”,
https://mp.weixin.qq.com/s/4CdtlYc1PlHP8DTEIM-7pg,最后一次访问日期:2024年8月14日。
5.德国《道路交通法》第七条规定,车辆保有者在使用过程中,对他人造成损害的,对所生损害负赔偿责任,但损害是由不可抗力或者受害人的故意造成的除外。全国人大常委会法制工作委员会民法室编:《侵权责任法立法背景与观点全集》,法律出版社2010年版,第725页。
供稿 | 曾顺东律师团队
编辑 | 安佳琪
审核 | 叶素筠
案件咨询
400-700-0148
*
*
*
发 送
*
*
联系我们
020-66600890
greenleaflaw@126.com
法律咨询电话:
020-66600890
涉外业务咨询热线:
020-66600890
联系我们
|
企业邮箱
|
律师联盟
|
投诉平台
|
友情链接
版权所有@广东格林律师事务所
粤ICP备13001088号
网站建设:
合优网络
粤公网安备 44010602009634号
关闭